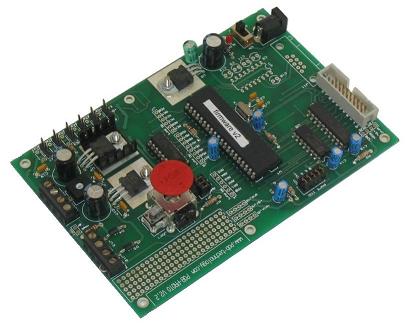
The POB-Proto is an analogical and numerical Input/Output module.
With the joystick, you can pilot your robot or design a graphical user interface.
The POB-Proto allows DC motors management as well as servomotors or any kind of I/O used for your own sensors and actionnors.
POB-PROTO is the second slave device for the POB-EYE.
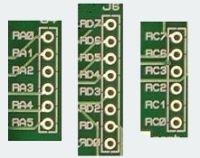
This board allows you to build your own interface with the
POB-EYE. The firmware of this port gives you access to 6
analogic input (PORTA), 14 digital I/O (PORTC and
PORTD).
Many pins of these ports are used to manage the red
joystick, 6 servomotors or another stuff.
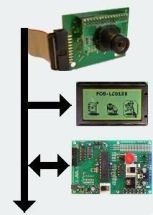
Because POB-EYE has 15 digitals I/O, POB-TECHOLOGY made a
bus similar to a PCI bus used in a personal computer. With that
bus, POB-EYE can communicate with several slave devices faster
than any serial protocol like the I2C bus. POB-PROTO is the
second slave device of POB-EYE: it allows the user to

You can use the joystick to control the cursor on
the LCD screen. It's working due to its two
potentiometer linked to PORTA (RA0 and RA1).
Moreover a pushbutton is available on the joystick
and linked to RA4.

The POB-PROTO board has 6 connectors to gear servomotors
(PORTC0 RC1 RC2 RC3 RC6 RC7). To manage the position
of a servo, just use the SetServoMotor function.
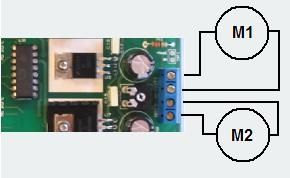
The H bridge is linked to PORTD (RD0, RD1, RD2,
and RD3). It gears the 2 DC motors link to the
connector block. To adjust the voltage on the
motors, use the potentiometer and if needed you
can use a multimeter on the test points.
Of course, if you want to use PORTA,PORTD and
PORTC for an another purpose, feel free to do it.
Spaces on the POB-PROTO are dedicated.
Applications
Pilot your robot devices for perception and action on to the environment :
o Drive DC motors and servomotors
o Use the joystick for a graphical user interface
o Add your own sensors (distance, infrared, inclination, etc.)
o Manage I2C normalized modules (with Pob-Eye)
Other pedagogic interests :
o Analogical and numerical Input/Output management
o PIC development
o Pilot a slave device via a data and addresses bus (with POB-Eye)
Documents
POB Technology Manual
POB BASIC Programming Manual
POB JAVA Programming Manual
Video Clips


Features
This module is based on a PIC 16F877 and is reprogrammable, you can manage :
o 1 joystick.
o 6 servomotors.
o 2 DC motors via an H bridge
Furthermore, the user can manage :
o 6 analogical inputs (that can be configured as digital I/O).
o 8 digital I/O.
o 6 other digital I/O (that can control 6 servomotors).
o Power pins (5v and +alim)
o Bus I2C (with Pob-Eye)
Dimensions : 100x150 mm